UgCS Commands
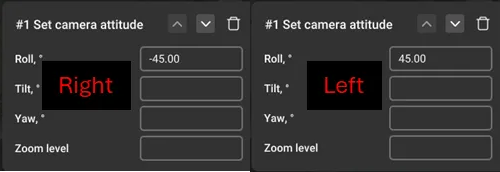
Command: Inside each Waypoint needed, Set camera attitude:
Set roll to 45, -45, 0. By default the pitch and yaw will normally be 0 when scanning data
⚠️
Set camera attitude: 0, 0, 0, before landing
Command: Inside each Waypoint needed, Set camera attitude:
Set roll to 45, -45, 0. By default the pitch and yaw will normally be 0 when scanning data
Set camera attitude: 0, 0, 0, before landing